
산업동향
의료 분야에서 AI와 마이크로로봇의 융합: 최근 개발 동향
- 등록일2025-03-27
- 조회수424
- 분류산업동향 > 종합 > 종합
-
자료발간일
2025-03-14
-
출처
BRIC
- 원문링크
의료 분야에서 AI와 마이크로로봇의 융합: 최근 개발 동향
◈본문
1. 서론
1.1. 마이크로로봇 기술 개요
마이크로로봇(microrobot)은 일반적으로 1 ㎜ 이하의 크기를 가진 미세 구조물을 지칭하지만 [1], 더 넓은 의미로는 밀리미터에서 마이크로미터 범위의 특성 크기를 가진 소형 로봇을 포함한다 [2]. 이러한 마이크로로봇은 비침습 중재를 가능하게 하여, 의료 응용의 지평을 넓히고 있다 [1].
마이크로로봇은 실험실 연구에서 좋은 결과를 보여주었지만, 임상 현장에서 사용하려면 해결해야 할 여러 가지 문제가 있다. 마이크로 크기에서의 제작 방식, 상호작용, 움직임에 대한 이해가 필요하며, 마이크로 로봇의 접근을 위하여 무선 작동 같은 작동 및 제어 방식을 개발해야 한다 (그림 1).

그림 1. 의료 마이크로로봇의 분류.
(좌) 완전히 새롭게 설계하고 제작한 초소형 로봇, (우) 기존의 대형 로봇을 소형화한 로봇
약어: GI, gastrointestinal; US, ultrasound
출처: 참고문헌 [2]
마이크로로봇의 설계는 용도에 크게 좌우된다. 응용 분야의 요구사항에 따라 크기, 기계적 성질, 힘 출력(force output), 재료 선택 등이 결정되기 때문이다. 또한, 특정 신체 부위의 특성과 표적 부위까지의 거리 등을 고려하여 적절한 제어 전략을 수립하게 된다 [2].
마이크로로봇의 이동 경로로는 소화기계 및 혈관계가 주로 이용된다 (표 1). 이러한 경로를 통해 목표 장기에 도달한 마이크로로봇은 연조직이나 고형 종양 내부로 침투하게 된다 [2].
표 1. 마이크로로봇 활용과 관련된 신체 부위의 중요한 해부학적 특징
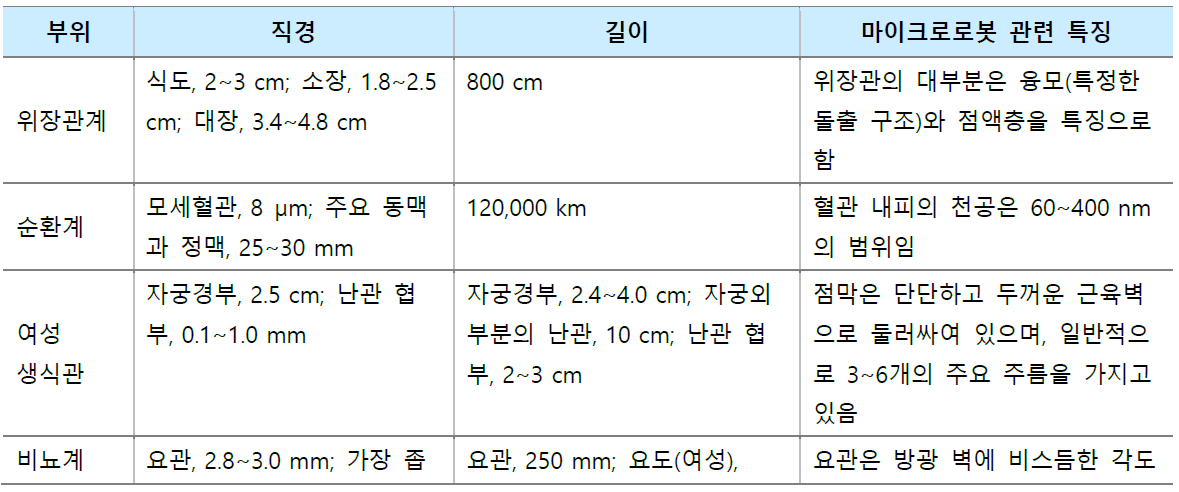

약어: NA, not applicable
출처: 참고문헌 [2]의 표를 번역 및 재가공
1.2. 현재 기술의 한계
인체 내부의 복잡한 구조와 계속적으로 변화하는 환경은 마이크로로봇의 제어와 영상화를 어렵게 한다. 깊은 조직 내부의 실시간 시각화와 로봇 제어를 구현하려면 난이도 높은 기술을 요한다 [1].
마이크로로봇의 생체 내(in vivo) 적용을 위한 과제는 크게 세 가지로 정리할 수 있다. 기본 과제로 마이크로 규모에서 표면력이 부피 효과보다 지배적이어서 기존의 물리 모델을 적용하기 어렵다는 점이다. 현실적인 과제로는 구성 요소의 초소형화, 혁신적인 제작 기술의 탐색, 효과적인 구동 및 센싱 시스템의 개발, 적합한 제어 방법의 설계가 있다. 임상적인 과제로는 안전성과 효능을 보장할 수 있는 적절한 재료 선택, 생체 적합성 확보, 의료 영상을 활용한 체내 추적 및 실시간 피드백 구현이 요구된다 [1]. 이러한 과제들을 극복하면 마이크로로봇 기술의 실제 의료 현장 적용이 가능해질 것이다.
1.3. AI와 마이크로로봇 융합의 장점
머신러닝(Machine Learning, 이하 ML)은 마이크로로봇의 의료 분야 활용에서 다양한 기술적 난제를 해결하는 데 중요한 역할을 할 수 있다. ML은 방대한 데이터를 분석하고, 의사결정을 지원하는 도구로 활용될 수 있으며, 높은 정확도와 적응성으로 인하여 여러 산업에서 주목받고 있다 [1].
최근 로봇 공학에서 ML 기술이 적극적으로 도입되며, 특히 로봇 비전과 내비게이션 기술 발전에 기여하고 있다. ML 기반 로봇은 축적된 데이터를 활용해 패턴을 학습하고, 환경 변화에 적응하며 자율적으로 움직일 수 있어 복잡한 환경에서도 안정적인 성능을 발휘한다 [1].
의료 분야에서도 ML의 적용은 유망한 것으로 보인다. 예를 들어, 수술 로봇에 ML 알고리즘을 적용하면 외과 수술의 정밀도를 높이고, 의료진의 부담을 줄이는 데 기여할 수 있다. 또한, ML 기술을 의료 영상 분석에 활용하면 병변 검출과 질병의 조기 진단을 보다 정밀하게 수행할 수 있어 진단 정확도가 향상될 것으로 기대된다 [1].
대형 로봇에서 성공적으로 적용된 ML 기술을 미세 규모 로봇에도 채택하려는 연구가 활발히 진행되고 있다. 마이크로로봇은 복잡한 운동 특성 때문에 전통적인 모델링 방식이 사용되기 어려우므로, 이를 보완할 수 있는 ML 기반 접근 방식이 주목받고 있다. 특히 모델 없이도 학습과 적응이 가능한 ML 기술은 마이크로로봇이 예측 불가능한 환경에서도 효과적으로 작동할 수 있도록 한다 [1].
ML은 마이크로로봇의 자동화 및 예측 가능성을 향상시키며, 정확한 영상 처리와 정밀한 내비게이션 기술을 구현하는데 기여할 가능성이 크다. 예를 들어, ML 알고리즘을 활용하면 마이크로로봇이 복잡하고 불안정한 환경에서도 자율적으로 경로를 탐색하고, 최적의 제어 방식을 학습할 수 있다. 이는 개별 마이크로로봇뿐만 아니라 여러 개의 마이크로로봇이 협력하여 움직이는 군집 제어 시스템에도 적용될 수 있다. 또한, ML을 기반으로 한 영상 처리 기술은 마이크로로봇과 주변 환경에 대한 정밀한 정보를 제공하여 인식 및 제어 능력을 개선한다. 이러한 기술적 융합을 통해 보다 지능적이고 자율적인 마이크로로봇 개발이 가능해질 것으로 전망된다. 궁극적으로, ML의 도입은 마이크로로봇의 안전성과 성능을 한층 향상시키며, 의료 분야에서 보다 정밀하고 효율적인 치료를 지원하는 기반이 될 것으로 기대된다 [1].
ML은 의료 마이크로로봇 분야에서 아래의 예시와 같이 활용될 것으로 보인다 [1].
1) 안전한 물질 선택: 안전성과 생체 내 반응성 측면에서 최적의 재료 선택을 지원한다.
2) 최적 설계 탐색: 마이크로로봇의 유연성, 기동성, 효율성을 극대화하는 설계를 탐색한다.
3) 실시간 물체 탐지: 수술 중 목표물, 마이크로로봇, 장애물을 정확히 식별한다.
4) 기능 향상: 특정 작업(예: 약물 전달, 조직 상호작용)의 수행 능력을 개선한다.
5) 최적 경로 계획: 효율성을 높이면서 위험을 최소화하는 경로를 설계한다.
6) 동적 환경에서의 정밀 내비게이션: 마이크로로봇의 원활한 이동과 정확한 목표 도달이 가능해진다.
...................(계속)
☞ 자세한 내용은 내용바로가기 또는 첨부파일을 이용하시기 바랍니다.
-
이전글
- 전문가가 주목한 Biohealth Focus 2025
-
다음글
- 중국_2025