
BioINpro
(BioIN + Professional) : 전문가의 시각에서 집필한 보고서 제공약물전달체 마이크로 나노로봇 연구동향
- 등록일2017-04-05
- 조회수21316
- 분류레드바이오 > 의약기술, 플랫폼바이오 > 바이오융합기술
-
저자/소속
김진영(선임연구원), 최홍수(센터장)/대구경북과학기술원 ETH 마이크로로봇 연구센터
-
발간일
2017-04-05
-
키워드
#나노로봇
- 첨부파일
-
차트+
?
차트+ 도움말
-
 약물전달체 마이크로 나노로봇의 정의 및 응용분야
약물전달체 마이크로 나노로봇의 정의 및 응용분야
-
(a) 3차원 레이저 리소그래피를 이용한 마이크로 나노로봇 공정 개요도와 (b) 제작된 여러 종류의 마이크로로봇의 초고해상도 주사전자현미경 사진
-
마이크로 나노로봇의 일반적인 구동 원리
-
TDC 제어기술 기반 자기장 정밀 제어를 이용한 자성체 정밀 제어 사진
-
TDC 제어 다이어그램
-
체내 약물전달방법 모식도
-
약물전달체 마이크로 나노로봇의 기대효과
-
(A) 망막질환 약물전달용 마이크로로봇 및 (B) 나선형 마이크로로봇에 세포 배양을 통한 생체적합성 테스트
-
(a)박테리아를 이용한 마이크로로봇 모식도, (b) 자기장에 의해 제어되는 마이크로로봇 및 (c) 미세가공공정을 이용한 약물전달용 Soft Capsule Robot
-
(a) 마이크로 나노로봇으로 사용된 MC-1 주자성(Magnetotactic) 박테리아 내부의 자기입자(magnetosomes), (b) 약물을 탑재한 리포좀이 표면에 부착된 MC-1 주자성 박테리아
-
마이크로버블 생성과 외부자기장 제어를 통한 마이크로튜브 구동
-
정자수송 마이크로모터 (Sperm carrying micromotor)의 (a) 개념도와 (b) 실제 난자로의 정자 수송 사진
-
 국내 주요 약물전달체 마이크로 나노로봇 연구그룹의 연구동향 및 기술소개 요약
국내 주요 약물전달체 마이크로 나노로봇 연구그룹의 연구동향 및 기술소개 요약
-
동물모델을 이용한 자기장 내에서의 마이크로 나노로봇 검증
-
 약물전달체 마이크로 나노로봇 연구동향.pdf
약물전달체 마이크로 나노로봇 연구동향.pdf
1. 약물전달체 마이크로 나노로봇 기술의 개요
가. 약물전달체 마이크로 나노로봇의 정의
약물 전달체 마이크로 나노로봇은 나노미터(nm: 10-9m)부터 밀리미터(mm: 10-3m) 사이의 크기를 가지며 신체 내의 질병 부위에만 정확하게 약물을 전달할 수 있는 의료용 미세 로봇이다. 복강경 수술용 로봇인 da Vinci와 같은 일반적인 의료 로봇이 크기에 의한 한계로 도달할 수 없는 곳까지도 작은 크기의 마이크로 나노로봇은 약물, 세포 등의 다양한 치료 매개체를 정밀하게 질병 부위에만 전달하여 암조직 파괴, 조직재생 및 회복 등의 표적지향형 치료에 이용될 수 있을 것으로 기대되어 지고 있다. 또한 미세한 사이즈로 인해 전통적인 진단 및 치료 방식에 비해 고통이 없는 비침습적(상처 없이 치료) 또는 최소칩습적(최소한의 상처를 내는 치료)인 치료가 가능할 것으로 기대되고 있다.
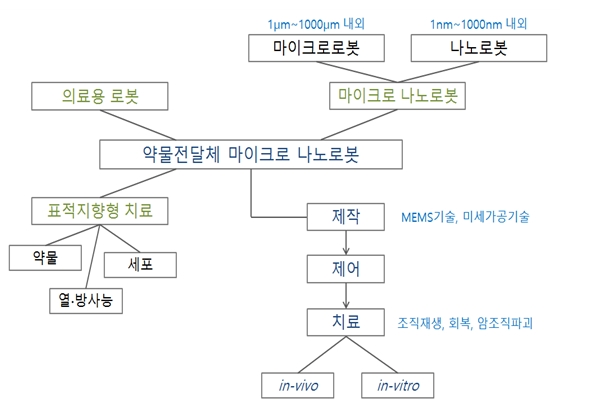
[그림 1. 약물전달체 마이크로 나노로봇의 정의 및 응용분야]
나. 약물전달체 마이크로 나노로봇의 기술의 개요
약물전달 마이크로 나노로봇의 핵심 기술은 크게 마이크로 나노로봇의 구조체 제작, 마이크로 나노로봇의 위치와 방향의 정밀제어, 마이크로 나노로봇으로의 치료 매개체 탑재 등 세 가지로 나눌 수 있다.
(1) 마이크로 나노로봇의 제작
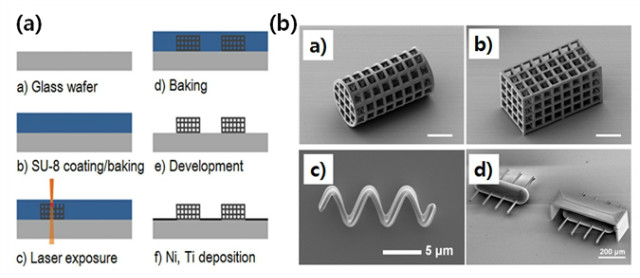
[그림 2. (a) 3차원 레이저 리소그래피를 이용한 마이크로 나노로봇 공정 개요도와 (b) 제작된 여러 종류의 마이크로로봇의 초고해상도 주사전자현미경 사진 [1, 15].]
마이크로 나노로봇의 구조체는 레이저 머시닝, 반도체 공정을 기반으로한 미세전자기계시스템(MEMS) 기술 등 다양한 방식으로 제작될 수 있다. 하지만 이러한 방식들은 2차원적인 공정으로서 3차원의 복잡하고 초미세한 구조체를 구현하는데 한계가 있다. 이에 반해 그림 2(a)에서 보이는 3차원 레이저 스테레오 리소그래피 시스템은 고에너지를 가진 레이저 빔을 이용하여 광경화성 폴리머를 선택적으로 노출시키는 공정으로 높은 해상도의 3차원 구조물을 정밀하게 제작할 수 있다. 레이저 빔의 초점면(Focal plane)에서 광경화성 폴리머를 경화시킬 수 있는 강한 에너지를 형성하며 초점면을 이동시키면서 3차원 구조물을 완성하게 되는 원리이다. 이 시스템은 주로 폴리머 기반의 3차원 구조물 제작에 사용되며, 최소 선폭은 수배나노미터에서 수밀리미터까지 구현 가능하다. 이러한 장점으로 최근 마이크로 나노로봇 제작에 많이 사용되어 지고 있다. 3차원 구조체를 형성한 후 자기장을 통한 위치와 방향 제어를 위해 로봇의 표면을 자성물질인 니켈(Ni)과 생체적합성 향상을 위해 생체 적합성 물질인 티타늄(Ti)으로 차례로 증착시켜 완성한다. 그림 2(b)는 3차원 레이저 리소그래피 기술로 제작한 3차원 다공성 구조 등 다양한 마이크로 나노로봇의 주사전자현미경 사진이다.
(2) 마이크로 나노로봇의 정밀제어
자동차와 같은 일반적인 이동시스템과 마찬가지로 마이크로 나노로봇 정밀제어 기술 역시 마이크로 나노로봇의 추진을 위한 구동 기술과 목표 지점까지 안내하기 위한 위치 및 방향 제어기술이 핵심이다.
[그림 3. 마이크로 나노로봇의 일반적인 구동 원리 [2]]
구동 기술의 경우 고려되어야 할 점은 신체 내에서의 약물전달을 목적으로 하는 마이크로 나노로봇은 기본적으로 유체 환경에서 이동하게 되므로 유체의 점성 등으로 인한 유체저항성을 극복할 수 있는 추진력을 확보하는 것과 초미세한 크기로 인하여 일반적인 에너지원 혹은 배터리를 탑재할 수 없다는 것이다. 이를 위해 마이크로 나노로봇 자체적으로 추진력을 발생하거나, 외부에서 무선으로 구동시키는 연구가 활발하게 이루어지고 있다.
그림 3은 대표적인 마이크로 나노로봇의 구동원리로, 주변 유체와의 화학적(Chemical) 반응, 외부로부터의 음파(Acoustic)에너지 혹은 자기장(Magnetic)에너지 그리고 박테리아의 운동성 등의 생물학적(Biological) 추진력을 이용하는 등 다양한 방식들이 있다. 자기장의 경우 다른 구동 원리에 비해 신체 내 안전성이 높으며, 신체 외에서 원격으로 정밀 제어가 가능하므로, 외부자기장을 이용한 마이크로 나노로봇의 구동 방식이 가장 많이 사용되고 있다. 외부자기장 제어 시스템에서는 자기장 기울기(Magnetic field gradient) 혹은 회전자기장(Rotating magnetic field)를 형성하여 마이크로 나노로봇의 구동을 제어한다.
그림 4 (a)와 (c)는 자기장 기울기를 형성하여 당김(Pulling)에 의해 마이크로로봇을 구동시키는 개념도와 실제 실험 사진을 보여주고, 그림 4(b)와 (d)는 회전자기장을 가하여 마이크로로봇을 회전시키는 개념도와 사진을 보여주고 있다. 회전자기장의 경우 주로 그림 2(b)-➃과 같은 나선형(Helical) 마이크로 나노로봇을 위해 주로 사용되는 방식으로 나선회전운동(Corkscrew motion)으로 인한 전방추진력을 발생시킬 수 있으며 자기장 기울기에 의한 당김 방식보다 효율적이다.
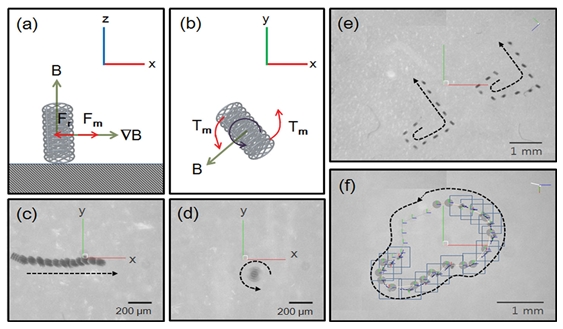
[그림 4. 외부자기장을 이용한 스캐폴드 마이크로 로봇 제어 (a) 자기장 기울기와 (b) 회전자기장을 이용한 마이크로로봇 구동 개념도, (c) 자기장 기울기와 (d) 회전자기장에 의한 마이크로 로봇의 실제 구동, (e) 두 개의 마이크로 로봇의 동시 제어, (f) 마이크로 로봇의 목표지향형 제어[1]]
앞서 소개된 구동 원리만으로는 마이크로 나노로봇은 전방으로만 이동할 수밖에 없으므로 목표한 위치까지 정확히 도달하기 위해서는 마이크로 나노로봇을 위한 조향기술이 반드시 필요하다. 조향기술 역시 외부자기장 방식이 가장 많이 사용되고 있으며, 그림 4(e)와 같이 같은 제어 공간 내에서 한 개 이상의 마이크로 나노로봇을 동시에 제어할 수도 있으며, 그림 4(f)에서 보이듯이 사전에 정해진 위치(회색 원), 경로를 따라 이동시키는 목표지향형 제어 역시 가능하다.
...................(계속)
* 로그인 하셔야 자세한 정보를 모두 보실 수 있습니다.