
기술동향
[KEIT PD 이슈리포트 2019-9월호] 수술로봇 기술동향과 산업전망
- 등록일2019-09-25
- 조회수8588
- 분류기술동향
-
자료발간일
2019-09-19
-
출처
한국산업기술평가관리원
- 원문링크
-
키워드
#수술로봇#KEIT#신기술
- 첨부파일
 이슈2_로봇.pdf
이슈2_로봇.pdf
[KEIT PD 이슈리포트 2019-9월호]
수술로봇 기술동향과 산업전망
■새로운 임상 분야와 신기술 기반 로봇 개발 및 상용화 확대
○2017년 치과 수술로봇, 2018년 연성내시경 수술로봇, 모듈형 복강경 수술로봇, 2019년 폐암 생검로봇 등 다양한 새로운 임상 분야 수술로봇 잇달아 상용화됨
○의료기기 글로벌 대기업의 수술로봇 분야 진입 급성장 (Johnson&Johnson의 Auris Health 34억 달러 기업인수, Siemens의 Corindus 12억 달러 기업 인수, Medtronics 신종 수술로봇 2020년 출시 계획)
○인공지능 기술의 활용 및 자동 수술 구현 기술 개발 확대 (유럽에서 EU 공동 프로젝트로 자동으로 보조의사 역할을 하는 수술로봇 시스템 개발 위한 SARAS 프로젝트 2018년 개시)
■시사점 및 정책제안
○미개척 임상 분야 또는 초기 개척 단계 임상 분야 제품 개발 촉진 필요
○차세대 원천기술 선제적 개발 및 유연한 정책적 지원 필요
1. 수술로봇의 개요
■수술로봇이란?
○일반적으로 의료로봇은 협의로는 수술 및 중재시술 등 수술적 치료를 위한 로봇을 의미하며, 광의로는 의료적 목적으로 사용되는 모든 종류의 로봇, 즉, 간호/간병 로봇, 재활훈련 및 장애인 보조 로봇(로봇형 인공 의수족 포함), 그리고, 약제, 병원 내 물류 등 의료 현장에서 진료 기능 보조를 위한 로봇을 모두 포함하여 일컬음
○수술로봇은 수술 및 중재시술 등 수술적 치료를 위한 로봇을 의미하며, 현재 상용화된 로봇으로 가장 대표적인 사례가
한국 큐렉소의 TSolution One, 미국 Intuitive Surgical의 da Vinci, 미국 Striker의 Mako 등이 있음
■수술로봇의 역사
○의료로봇은 1985년 산업용 로봇인 PUMA560을 뇌수술에 사용하면서 의료용 로봇의 가능성을 확인한 후 시작되었다고 볼 수 있으며, 2000년 수술 로봇으로서 세계 최초로 미국 FDA 승인을 받은 미국 Intuitive Surgical사의 da Vinci 로봇이 본격적인 로봇 수술 시대를 열었다고 할 수 있음
○수술로봇은 원래 1980년대 원격지에 멀리 떨어진 환자를 위한 원격 수술을 위한 로봇 시스템 기술 개발로 시작되었던 것이, 이후에는 흉강경과 복강경 등 최소침습수술 보조 로봇으로 실제 임상현장 적용 모델로 발전
○본격적인 임상적용은 2000년대 초반 미국 식약처의 임상 적용 허가를 받으면서부터이고, 이후 비뇨기과와 산부인과 등에서 급격히 활용이 증대되면서 다양한 수술로봇 기술 개발이 진행됨
○수술로봇과 거의 비슷한 시기에 중재시술, 특히 바늘형 시술 도구를 영상 유도 하에서 삽입하는 시술에 대한 로봇과 혈관 내에 카테터를 삽입하는 것을 원격제어하는 로봇에 대한 다양한 기술 개발이 이루어짐
- 주로 생검 또는 고주파 절제술을 위하여 시행하는 바늘 삽입형 중재시술의 경우, 일부 상품화도 시도되었으나 크게 성공하지 못하였고, 최근 들어 암 진단 증가 및 영상 장비 기술 고도화에 따라 다시 다양한 형태의 로봇 개발이 시도됨
- 카테터 원격제어 로봇의 경우에는 2000년대 중반에 전자기장 방식의 미국 Stereotaxis사의 Niobe와 굴곡로봇 방식의 미국 Hansen Medical사의 Sensei 등의 시스템이 상용화되었으나, 여러 단점들 때문에 임상 현장에서 크게 주목 받지는 못하였고, 최근 들어 다시 활발하게 후속 개발이 진행되고 있음
○국내에서는 1990년대 후반 카이스트에서 개발한 정형외과 인공관절 수술보조로봇, 마이크로 원격수술로봇 등이 시초로 보이며, 2003년 복지부 지원으로 차세대 수술로봇 연구개발센터가 시작되면서 한양대, 포항공대, 카이스트, 국립암센터 등을 중심으로 다양한 수술로봇의 개발이 이루어짐
○2000년대 후반부터는 심장중재시술 카테터 원격제어 로봇, 재활로봇, 간호로봇 등의 실험적 기초 기술이 개발되었고, 2010년 이후로는 로봇 분야 대형 정부 과제 지원을 중심으로 보다 활발하게 다양한 로봇이 상업화까지를 목표로 개발됨
○2019년 현재 미래컴퍼니의 복강경 수술보조 로봇, 고영테크놀러지의 신경외과 수술용 항법 보조 로봇, 큐렉소의 인공관절 수술로봇, 현대중공업과 큐렉소의 영상의학 중재시술 보조 로봇, 이지엔도서지컬의 유연내시경 수술로봇, 넥스턴의 부정맥 중재시술 보조 로봇 등이 상용화 또는 임상시험 단계에 이른 것으로 알려지고 있음
■새로운 다양한 수술로봇의 종류와 공통 기술
○기존의 복강경 수술로봇, 인공관절 수술로봇 외에 기술 개발 중에 있거나 상품화 초기 단계에 있는 다양한 수술로봇이 있으며 경조직 수술로봇, 연조직 수술로봇, 수술로봇 플랫폼으로 대별해 볼 수 있음
| 그림 1. 수술로봇 기술 분류 |

2. 수술로봇 기술 동향
■공통기술
○인공지능 기반 수술 중 실시간 정밀 영상 정보 획득/처리/가시화 기술: 초음파 영상, 방사선투시영상, 공초점 현미경 영상 및 내시경 영상을 수술 중에 실시간으로 획득하고, 인공지능 기술을 응용하여 영상처리를 시행하여 수술에 필요한 정보를 추출/제공
○의료기기 등급 로봇팔 및 제어플랫폼과 의료용 정밀 위치추적장치 및 정합기술: 의사와 협업이 가능하고 의료기기 인증 획득이 가능한 로봇팔 및 제어플랫폼, 의료용 위치추적장치, 의료용 AR/VR 디스플레이 장치 및 소프트웨어, 인공지능 기반 의료영상 소프트웨어 모듈, 영상장비와 로봇간 정밀 캘리브레이션 기술 등
- 고정밀 3차원 위치 추적이 가능한 의료용 위치추적장치
- 공간 정합을 위한 최적의 알고리즘
- 의료 영상에서 신경, 혈관 등의 관심 부위를 분할하거나, 3차원 재구성을 위한 인공지능 알고리즘
- 영상 정합, 카메라 캘리브레이션, 핸드-아이 캘리브레이션 등의 핵심 기반 기술 및 영상정보 시각화를 위한 인터페이스 기술 등
○소프트 로봇 구조 및 제어 기술 기반의 굴곡 조향형 기구 기술: 인체 내에서 환부까지 안전하게 접근 및 작업을 가능하게 하는 굴곡 메카니즘을 갖는 조향 장치, 유연하게 굴곡 조향이 가능한 로봇 수술도구부터 복수의 로봇 수술도구들을 수술 부위까지 가이드하며 조향 가능한 오버튜브까지 굴곡 조향형 기구의 요소 기술을 포함
- 소프트 로봇 기술을 응용하여 최소 구경 및 최대 굴곡각을 구현할 수 있는 기구 구조 설계 및 제작 기술
- 임의의 굴곡 변화에도 끝단 조향의 정밀도와 강성을 유지할 수 있는 기구 구조 설계 및 제어 기술
- 구동 와이어의 기계적 성능 및 신뢰성 향상을 위한 재질 및 구조와 터미널 처리 방식 최적화 기술
- 내시경, 겸자, 에너지 디바이스 등 다양한 기구들을 삽입할 수 있는 채널을 지닌 구조에서 마찰력을 최소화하고 전기 절연 및 방수가 가능하며 생체 적합성을 지닌 재질의 굴곡 조향형 기구 가공 기술
- 와이어 구동을 정확하게 전달하며 로봇에 탈부착이 용이한 연결 인터페이스의 최적 설계
- 바이폴라 전기수술기와 같은 에너지 디바이스의 전류로부터 주변 생체조직을 보호할 수 있도록 완벽한 절연 성능을 지니면서 동시에 조향 성능을 보장하는 굴곡 조향형 기구 설계 및 제작 기술 등
○로봇 수술 시뮬레이션 및 계획 시스템 기술: 환자 빅데이터 기반 인공지능 기술 이용한 모의수술 및 수술계획 시스템 기술
- 환자 개인 데이터를 기반하여 3D 프린트와 같은 실물 모델 또는 VR을 이용한 가상모델에서 실제 수술과 같은 환경에서 트레이닝 기회 제공
- 수술 전 환자의 각종 검사 자료 및 영상을 취합 후 가시적인 데이터로 변환하여 정밀한 수술 계획을 실시
- 수술 로봇의 구동 조건을 고려하여 로봇 수술 과정에 맞는 최적의 수술 계획을 안내하고 수술 로봇에 전달
■국내외 기술동향
○수술 로봇의 자동화에 관한 연구는 시작단계이며, 현재는 의료진의 의도를 반영하는 마스터-슬레이브 방식 또는 의료진의 수술을 보조하는 역할을 수행
- 자율성 가진 의료기기 안전 국제표준 (IEC TR 60601-4-1 Guidance and interpretation ? Medical electrical equipment and medical electrical systems employing a degree of autonomy)에서 10단계의 자동화 단계 구분을 제시함
| 그림 2. IEC 표준 기술 문서에서 정의한 자동화 단계 구분 |

- 상용화된 다빈치의 경우 로봇의 정보를 분석하여 수술 동작 및 과정을 실시간으로 식별하려는 연구가 시도 됨
- 바늘 삽입, 봉합, 위치 특정 및 정해진 조직의 적출 등 정해진 작업을 자동으로 수행하는(task autonomy) 연구가 활발히 진행되고 있음
- 일본 동경대에서는 치아 절삭을 인공지능을 이용하여 계획하고, 로봇에 의해서 정밀히 수행되는(high autonomy) 단계의 연구 결과가 보고 됨
- 향후, 데이터와 딥러닝 기술을 응용하여 수술 로봇 자동화에 관한 연구가 증가할 것으로 예상 됨
○수술 로봇의 엔드이펙터는 최소화되고 굴곡 구조를 가진 디바이스가 상용화 되고 있으며, 안전성을 고려한 로봇 조정기에 관한 연구가 보고 됨. 또한, 3D 프린팅 기술을 이용한 환자 맞춤형 기구에 관한 연구가 보고 됨
- 싱글포트수술 또는 자연개구부 수술에 적용하기 위한 유연(flexible)타입 수술로봇의 관절 구동형 굴곡 메커니즘과 조작기술, 강성변화 메커니즘에 관한 연구가 활발하며, 일부 상용화 됨
- 수술로봇의 안전성을 높이기 위해 힘 반향 기술, 중력 보상기술, 사용자 시선 추종 기술 등을 적용한 조정장치가 개발 됨
- 중국 상하이교통대에서는 3D 프린팅을 이용한 환자 맞춤형 임플란트를 제작, 임상에 적용하여 그 결과를 보고 함
○의료 빅데이터, 인공지능 및 IoT에 관한 연구 사례가 증가하고 있음
- 일본 도쿄여자대학에서는 사이버 수술실(SCOT; Smart Cyber Operating Theater)을 구축하여, 수술 중의 모든 정보를 디지털화 하여 저장하고, 해석하려는 시도를 하고 있음
- 벤더 독립적인 다양한 의료로봇, 항법장치, 의료기기, 의료영상 등의 연결성을 확보하기 위한 미들웨어가 공개되었고, 특정 벤더들이 적극적으로 참여하여 수술실에서의 연결성이 확보되고 있음
- CT/MR영상, 방사선영상, 내시경영상의 자동 인식을 위한 딥러닝 기술에 관한 연구가 활발히 진행 됨
- 또한, 초음파 영상을 포함하는 환자의 각종 의료 정보, 로봇의 관절 데이터 등을 해석하기 위해서 인공지능을 이용하는 연구 결과가 보고 됨
- 캐나다 콜롬비아대학에서는 방사선 투시 영상에서 척추에 삽입된 나사못의 위치/자세를 인식하는 딥러닝 기술을 개발
○수술 중의 멀티모달 센싱에 의해 환자의 정보를 실시간으로 가시화 하는 연구가 활발히 진행되고 있음
- 초음파 영상 장치를 이용한 수술 항법에 관한 연구가 매우 큰 비중을 차지하고 있음. 이는 초음파가 인체에 무해할 뿐만 아니라, 실시간으로 영상 구성이 가능하다는 특징이 있기 때문임
- 근골격계 수술 분야에서 방사선 피폭의 위험성이 있는 방사선 투시영상 장치를 초음파 영상 장치로 대체하려는 연구가 증가
- 초음파 영상을 조직의 형태뿐만이 아니라, 조직의 탄성 또는 열 소작후의 조직 변화 등과 같은 기능을 파악하는데 사용하는 연구가 제안 됨
- OCT를 이용한 실시간 힘 반향, 촉각센서를 이용한 조직의 경도 가시화, 다 채널 전극을 이용한 심장의 전류 흐름 가시화 등 다양한 환자의 정보를 실시간으로 전달하려는 연구가 진행
- 독일, 홈볼트대학교에서는 뇌정위수술에서 AR기술을 응용한 임상적 경험을 보고하였고, 벨로루시 민스크대학에서는 골절된 경골의 상태를 AR기술을 응용하여 가시화하는 등 AR/VR/MR 기술을 응용한 의료 정보 가시화에 관한 연구가 활발함
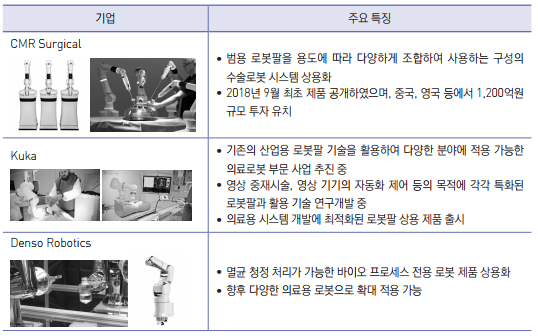
○축적된 산업용 로봇 기술을 의료용에 활용하는 의료용 로봇팔 제품이 등장하고 있으며 범용 로봇팔 형태의 기술에 기반한 수술로봇 및 중재시술 로봇 시스템 제품화 및 기술 개발 연구가 최근 부각되고 있음
- 세계적인 로봇 기업인 독일 KUKA는 의료 로봇 분야 제품을 기존 다빈치 수술로봇과 같은 전용 플랫폼 형태가 아닌 다양한 범용 로봇팔 구조 기반의 제품으로 상용화함
- 일본 Denso는 의료 및 바이오 공정에 다양하게 사용 가능한 의료용 특화 로봇팔 제품을 상용화함
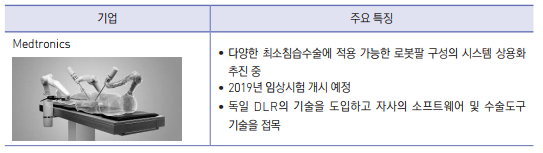
- 세계적인 의료기기 기업인 미국 Medtronics는 로봇팔을 복수로 협업 구성한 형태의 수술 로봇 기술을 개발 중인 것으로 파악됨
- 영국 CMR Surgical은 범용 로봇팔 형태 최소침습수술로봇을 2018년 9월 공개하고 1,200억원 규모의 투자 유치
| 표 1. 로봇팔 형태의 수술 및 중재시술 로봇 해외 주요 기술 동향 |
...................(계속)
☞ 자세한 내용은 내용바로가기 또는 첨부파일을 이용하시기 바랍니다.
동향