
부처연구성과
생체근육형 고출력 경량의 인공근육 구동기 개발
- 등록일2017-10-12
- 조회수6490
-
성과명
생체근육형 고출력 경량의 인공근육 구동기 개발
-
연구자명
최혁렬
-
연구기관
성균관대학교
-
사업명
바이오닉암 메카트로닉스융합기술개발사업
-
지원기관
과학기술정보통신부
-
보도자료발간일
2017-10-11
- 원문링크
-
키워드
#인공근육 #생체근육
- 첨부파일
 171011 조간 (보도) 생체근육형 고출력 경량의 인공근육 구동기 ...
171011 조간 (보도) 생체근육형 고출력 경량의 인공근육 구동기 ...
핵심내용
생체근육형 고출력 경량의 인공근육 구동기 개발
- 감각기능을 갖춘 바이오닉 손/팔 개발 기반 마련 -
□ 성균관대학교 최혁렬 교수 연구팀이 감각기능을 갖춘 의수 구현에 필요한 고출력 경량의 인공근육으로 작동하는 생체근육형 구동기를 개발했다고 과학기술정보통신부(장관 유영민, 이하 ‘과기정통부’)는 밝혔다.
ㅇ 기존의 기계형 팔과 손 등에 사용되는 모터형 구동기는 크기와 힘에 한계가 있었다. 무게가 무거우며, 상하·좌우 운동으로 움직임이 단조롭다는 단점이 있었다.
ㅇ 이번에 세계 최초로 개발된 인공근육형 구동기는 가벼운 스판덱스(Spandex)* 섬유를 꼬아서 제작한 것으로 기존 모터형에 비해 높은 힘을 낼 수 있다. 또한, 우수한 강도와 인성(靷性)을 갖춘 근골격으로 움직임이 훨씬 자유롭다는 장점을 가진다.
* 나일론과 여러 섬유를 혼합하여 만든 고무와 같이 신축성이 있는 합성섬유
ㅇ 또한, 신축성이 뛰어난 직물로 직조가 가능하고 동시에 생체근육과 유사한 수축·이완 및 회전운동이 가능해 절단환자용 의수·의족뿐만 아니라 착용형 기기나 인공지능 로봇 등에도 크게 활용될 수 있을 것으로 기대된다.
□ 본 연구는 과기정통부의 바이오닉암 메카트로닉스융합기술개발사업의 지원으로 2014년부터 수행하고 있다. 이번 연구를 통해 3건의 국내특허를 출원(’17. 1월, 7월)했고, 2건의 논문을 SCI 저널*에 게재(’17. 2월, 9월)했다.
* Smart Materials and Structures(impact factor: 2.909) : IOP(Institute of Physics) Publishing에서 발간하는 과학기술논문인용색인(SCI) 저널임
□ 특허명과 발명자 정보
① 특허명 : 폴리우레탄 파이버 기반의 액츄에이터를 제작하는 방법 및 상기 방법으로 제작된 폴리우레탄 파이버 기반의 액츄에이터
- 국내특허 출원번호 : 10-2017-0005158
- 발명자 정보 : 최혁렬 조경호 송민근 김영은 정호상 양상율
② 특허명 : 냉각액 순환형 인공 근육
- 국내특허 출원번호 : 10-2017-0010938
- 발명자 정보 : 최혁렬 송민근 조경호 정호상 양상율
③ 특허명 : 소프트 액츄에이터 제조장치 및 이를 이용한 소프트 액츄에이터 제조방법
- 국내특허 출원번호 : 10-2017-0086409
- 발명자 정보 : 최혁렬 조경호 양상율 김영은 김기현 정호상 박재형
□ 논문명과 저자 정보
① 논문명 : Electrically controllable twisted-coiled-artificial muscle actuator using surface-modified polyester fibers
- 저자 정보 : Jungwoo Park, Ji Wang Yoo, Hee Won Seo, Youngkwan Lee, Jonghwan Suhr, Hyungpil Moon, Ja Choon Koo, Hyouk Ryeol Choi, Robert Hunt, Kwang Jin Kim, Soo Hyun Kim and Jae-Do Nam
② 논문명 : High performance twisted and coiled soft actuator with spandex fiber for artificial muscles
- 저자 정보 : Sang Yul Yang, Kyeong Ho Cho, Youngeun Kim, Min-Geun Song, Ho Sang Jung, Ji Wang Yoo, Hyungpil Moon, Ja Choon Koo, Jae-do Nam and Hyouk Ryeol Choi
ㅇ 한편, 이번 성과로 2019년을 목표로 하고 있는 인공피부, 피부형 촉감 감지기(센서) 등 요소기술 융합으로 감각기능을 갖춘 바이오닉 손‧팔 개발에 한 발짝 더 다가서게 되었다.
상세내용
연구 개요
1. 연구배경
인공근육 구동기는 인간의 움직임을 모사하는데 있어서 가장 핵심적인 요소 기술이지만 아직까지도 사용하기에 적절한 인공근육 구동기의 기술은 개발되지 않았다. 현존하는 구동기들은 대부분(97%이상) 0.1~1 kg 중량의 범위에서 감속기를 포함한 DC 모터들로 사용되고 이 모터들은 대체로 ~100 W의 출력을 낼 수 있다. 하지만 약 300 W/kg 의 비출력을 내는 포유류의 근육을 생각하면 낮은 수준이며, 모터 고유의 거대한 부피와 부족한 유연성은 생체 근육과 같은 인공근육 구동기로는 적합하지 않다. 본 연구에서는 인간의 근육/근섬유의 구조와 구동 메커니즘을 규명하여 인공근육에 적합한 Active 유연 소재와 구조를 선정하고, 이를 기반으로 생체모방 인공 근섬유 구동기를 개발하였다.
2. 연구내용
본 연구진은 생체 근육을 능가하는 고변위/고출력의 인공근육형 구동기를 위해 인공근육 파이버와 이를 직조(weaving)하여 다양한 형태의 인공근육 구동기를 개발하였다. 본 연구진은 경량의 신축성 섬유(spandex 원사)를 사용하여 dual-twisting을 통하여 인공근육 파이버를 쉽게 제작할 수 있는 최적의 공정기술, 장치를 개발하였다. 더욱이 섬유로 제작된 인공근육 구동기를 실제 근육과 같이 다발형태로 묶는 기술과 옷감과 같은 직물 형태로 제작 하는 기술 또한 개발하였다. 본 연구진은 이 기술을 통해 제작된 다발형태의 근육을 팔, 골격 모형에 적용하여 사람의 움직임을 모사할 수 있음을 확인하였다. 또한 개발된 인공근육 구동기는 전극물질이나 열선을 활용해 전기 구동이 가능하기 때문에 기존의 전자회로로 쉽게 제어가 가능하다.
3. 기대효과
개발된 인공근육 구동기는 유연하면서도 우수한 구동성능( <35%이상 구동 )을 보여주며 이는 세계 최고 수준이다. 경량의 신축성 섬유로 제작되어 모듈화 혹은 직물로 직조가 가능해 절단환자용 의지(의족, 의수)는 물론, 착용형 로봇, 차세대 의류에도 충분히 활용될 수 있을 것으로 기대된다.
근육형 구동기 원리
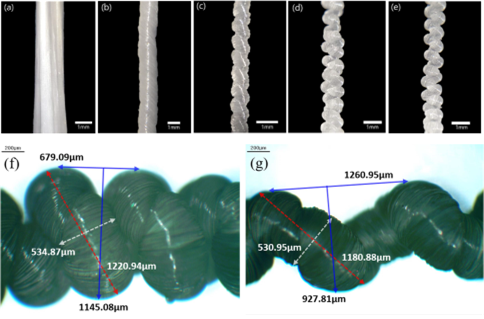
□ 인공근육형 구동기 제작 과정
o 신축성 섬유(Spandex fiber)를 필요한 길이만큼 자른 후 클립에 연결함.(a)
o 개발된 트위스팅 장비를 통해 신축성 섬유를 트위스팅 함.(b)
o 나선방향으로 배열되었던 신축성 섬유가 충분한 트위스팅이 되면 코일이 생기게 되며 이를 2차다시 coil하여 2차코일을 형성.(c~d)
o 코일이 모두 완성되었을 때, 열처리(training)를 통하여 신축성 섬유를 유연하게 함.(e)
o 열처리를 통해 코일과 코일 사이의 간격이 멀어지게 되며, 이는 추후 열에 의해 코일이 움직일 때 구동할 수 있는 공간으로 사용됨.
□ 인공근육형 구동기 구동 원리
o 트위스팅을 통하여 제작된 근육형 구동기는 코일의 구조를 가짐.
o 신축성 섬유는 열을 가할 시 길이방향으로는 수축하고 두께 방향으로는 팽창하는 특성을 가짐.
o 나선방향으로 배열된 신축성 섬유가 코일 형상을 가진 상태에서 열을 가할시, 신축성 섬유의 두께 방향의 팽창으로 인하여 트위스팅이 된 방향과 반대로 파이버가 회전 하게 되고, 이는 코일 구조에서 수축하는 방향으로 움직이게 됨.
...................................(계속)
☞ 자세한 내용은 내용바로가기 또는 첨부파일을 이용하시기 바랍니다.